
先說結論
嗯...這東西,雷射二極體跟透鏡的對位設備...聽起來很繞口。簡單講,它不是單純的組裝。它更像是替一根極細、看不見的「光纖」,在比頭髮絲還小的目標上「穿針引線」。這一步如果沒做好,後面再貴的雷-Di [雷射二極體] 也等於是廢了。所以,這設備的精度,基本上決定了高階光學模組的良率跟生死的。
為什麼這件事越來越重要?[應用場景]
以前可能只有光纖通訊骨幹網路這種專業領域會用到。 但現在不一樣了,需求是暴增的。 隨便想幾個:
- LiDAR [光達]:自駕車的眼睛。光要打得遠、收得準,發射端的雷射跟透鏡沒對好,看出去就是一片模糊。
- 3D感測:像手機的人臉辨識,或AR/VR眼鏡裡的空間定位。用的就是VCSEL陣列,上面有幾百幾千個發光點,每個都要跟自己的小透鏡對齊。 差一點,深度資訊就全錯。
- 矽光子 [Silicon Photonics]:這更麻煩。光要在晶片裡面跑,從光纖進到晶片裡那個介面,對位公差是以奈米在算的。 一點點失誤,光就進不去了,損耗會大到無法接受。
所以,以前沒那麼講究,但現在這些新應用把精度要求推到了極限。

核心原理:機器到底在忙什麼?
想像一下你用手拿著雷射筆,要照到對面牆上一個很小的點。你不只會前後左右移動 (X, Y軸),還會上下移動 (Z軸),同時你手腕也會不自覺地轉動,調整角度。對吧?
這台設備做的就是一樣的事,只是精細幾百萬倍。它用一個叫做「六軸平台」或「Hexapod」的東西來移動雷射或透鏡。 這六個軸分別是:
- 三個平移軸 (Translational):X (左右), Y (前後), Z (上下)。這個很好懂。
- 三個旋轉軸 (Rotational):Pitch (俯仰,點頭), Yaw (偏擺,搖頭), Roll (滾動,轉頭)。
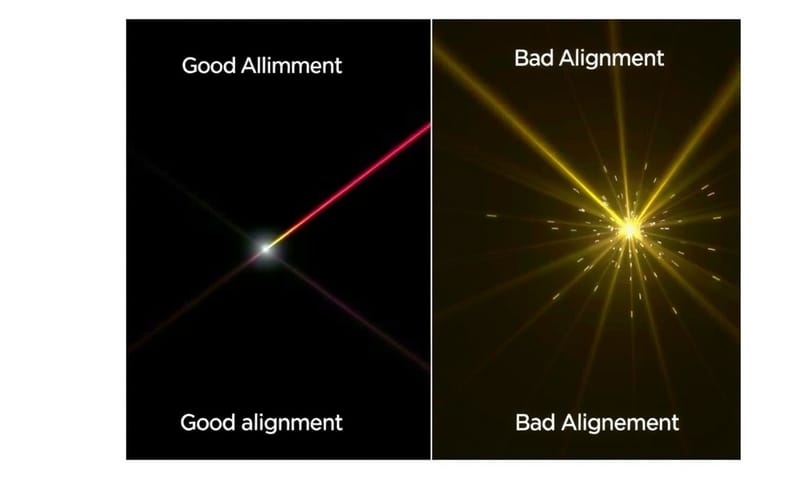
機器就是透過微調這六個軸,去找到一個光功率最高、光斑形狀最完美的「最佳位置」。 這過程很複雜,因為動了一個軸,常常會影響到另一個,這叫「耦合效應」。 所以需要很厲害的控制器跟演算法去即時計算。
主動 vs. 被動對位,選哪個?[一個關鍵抉擇]
對位主要有兩種做法,主動 (Active Alignment) 跟被動 (Passive Alignment),這是一個很大的分水嶺。 老實說,選哪個決定了成本、速度跟最終精度。
| 特性 | 主動對位 (Active Alignment) | 被動對位 (Passive Alignment) |
|---|---|---|
| 做法 | 很直覺。邊點亮雷射、邊用光功率計偵測,然後移動六軸平台直到光功率數值最大。 就是「看著結果調」。 | 不點亮雷射。靠高解析度的相機去看雷射跟透鏡上面的「標記點」(Fiducial Marks),用機器視覺讓標記對標記。 像在「盲調」。 |
| 精度 | 非常高。可以到次微米 (sub-micron) 等級,是追求極致效能的唯一選擇。 | 比較差。大概在幾微米到幾十微米,很吃零件本身的製造公差。 |
| 速度 | 慢。因為要一直來回掃描、找最佳點,有時候一個元件要花幾十秒甚至幾分鐘。 | 快。相機拍一下、算一下、移一下,很快就好了。適合大量生產。 |
| 成本 | 設備比較複雜,但對零件公差要求較寬鬆,所以單一零件可以比較便宜。 | 設備相對簡單,但對每個零件的精度要求極高,零件成本會很貴。 |
現在很多是混合式的。先用被動對位做粗調,再用主動對位做微調,兼顧速度跟精度。 這點跟台灣一些廠商,像是工研院,發展的方向蠻類似的,他們會看應用去整合不同方案。 相較之下,一些國外大廠如德國的PI (Physik Instrumente),他們會把六軸平台本身跟控制器軟體做到極致,提供一個非常強大的基礎工具。
精度要求有多恐怖?[公差的藝術]
這裡的數字很嚇人。一般來說,對位精度要求遠小於1微米 (µm)。 這是什麼概念?一根頭髮的直徑大概是50-70微米。等於是要把誤差控制在頭髮直徑的1/50以下。
尤其在單模光纖的耦合上,那個纖核 (core) 直徑只有9微米,要對準它,平台的移動解析度就要到奈米 (nm) 等級。 所以設備商會強調他們的重複定位精度可以到 ±0.06 µm 之類的。 這代表機器每次回到同一個指令位置,誤差都非常非常小。
產線上的挑戰 [理想與現實]
實驗室裡做出來很漂亮,但搬到產線上是另一回事。最大的魔鬼藏在細節裡:
- 膠水固化 [Epoxy Curing]:對準之後,要用UV膠或熱固膠把透鏡黏死。但在固化的過程中,膠水會收縮、產生應力,這個應力會把你好不容易調好的位置再拉偏掉。 這叫應力轉移。
- 熱穩定性:雷射二極體自己會發熱,機器運轉也會發熱。 溫度的變化會導致材料熱脹冷縮,好不容易對準的位置可能開機半小時後就跑掉了。 所以整個設備的熱管理非常重要。
- 震動:產線環境的任何微小震動,對這種奈米級的對位來說都是災難。設備本身需要很好的避震設計。
所以,一台好的設備不只是「很準」,還要能對抗這些現實世界的干擾因素。

常見錯誤與修正
幾個常見的坑:
- 只看六軸精度,忽略固化製程:很多人花大錢買了超精密的平台,但忽略了後面的點膠跟固化製程。結果膠水一固化,精度全跑掉。解法是必須把固化引起的偏移量也計算進去,做「預補償」。
- 環境溫度控制不佳:在沒有溫控的環境下進行對位,等於是白做工。 解決方案是要確保對位跟固化的空間有嚴格的恆溫恆濕控制。
- 忽略耦合效應:試圖手動或用簡單的軟體去「單軸調校」,結果發現調了A跑了B,永遠調不好。必須使用能夠解耦運算的專業控制器才行。
總之,這是一個系統工程。從平台、演算法、膠材到環境控制,每個環節都不能出錯。
你覺得呢? 在你的應用中,是「對位速度」比較重要,還是「極致的精度」更關鍵?在下面留言分享你的看法吧!


